Yaru Niu
Hi! I am a PhD candidate at CMU Safe AI Lab, advised by Prof. Ding Zhao. Previously, I received an M.S. in Electrical and Computer Engineering at Georgia Tech, working with Prof. Matthew Gombolay. Before that, I received a B.E. in Intelligence Science and Technology at South China University of Technology. I also spent wonderful time as a research intern at BCAI, Baidu Research and MSC Lab at UC Berkeley.
My current research focuses on cross-embodiment learning for robotic manipulation and multi-agent systems. My research goal is to build methodologies for scalable and collaborative robotic systems that can interact effectively with the real world. My work is generously supported by Google DeepMind and Toyota North America.
My Chinese name is 牛雅儒 (Niu-Ya-Ru), where my first name (雅儒) means a scholar with elegance in ancient Chinese.
CV / Google Scholar / Twitter / Github / Linkedin
News
| Jan, 2026 | Excited to be joining NVIDIA LPR as a research intern this summer to work on robot learning from human data. |
|---|---|
| Oct, 2025 | Lightning talk at CMU-Amazon AI Innovation Hub events. |
| Oct, 2025 | Talk and live demo at Google DeepMind, Mountain View. |
| Aug, 2025 | Human2LocoMan (in RSS 2025) is coverd by CMU Engineering (video story), 3D视觉工坊 (invited talk), IEEE Spectrum, etc. |
| Jan, 2025 | MAPush is accepted to ICRA 2025. See you in Atlanta! |
| May, 2024 | Our work LocoMan is covered by TechXplore, IEEE Spectrum, CMU Engineering, GlobalSpec, and Interesting Engineering. |
| Nov, 2023 | Our work RoboTool is covered by TechXplore, ML@CMU Blog, and CMU Engineering. |
| Jun, 2023 | Our work on goal-conditioned curriculum reinforcement leanring for robotic scooping is accepted to IROS 2023. |
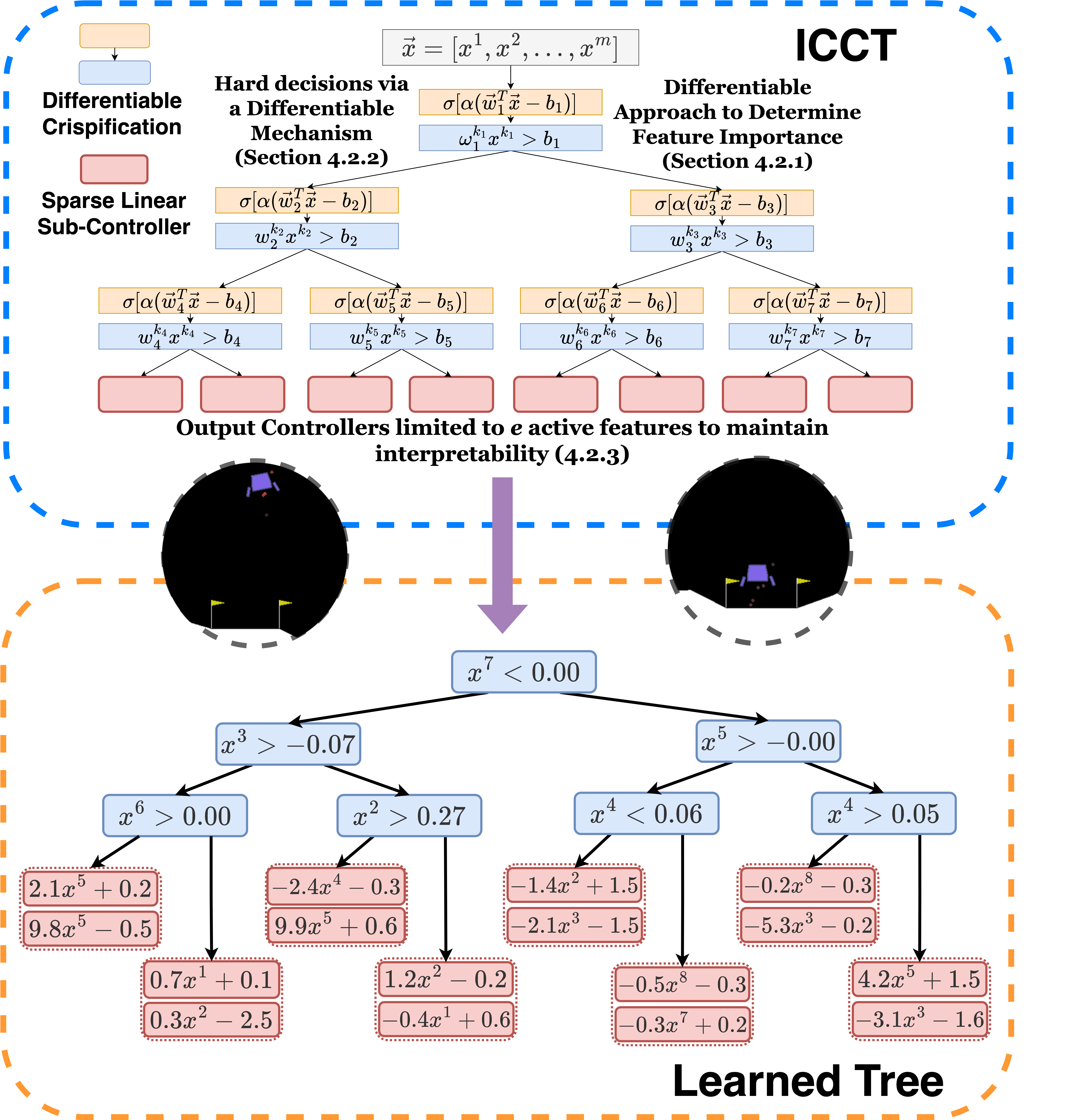
| Apr, 2022 | Our work Interpretable Continuous Control Tree (ICCT) is accepted to RSS 2022! |
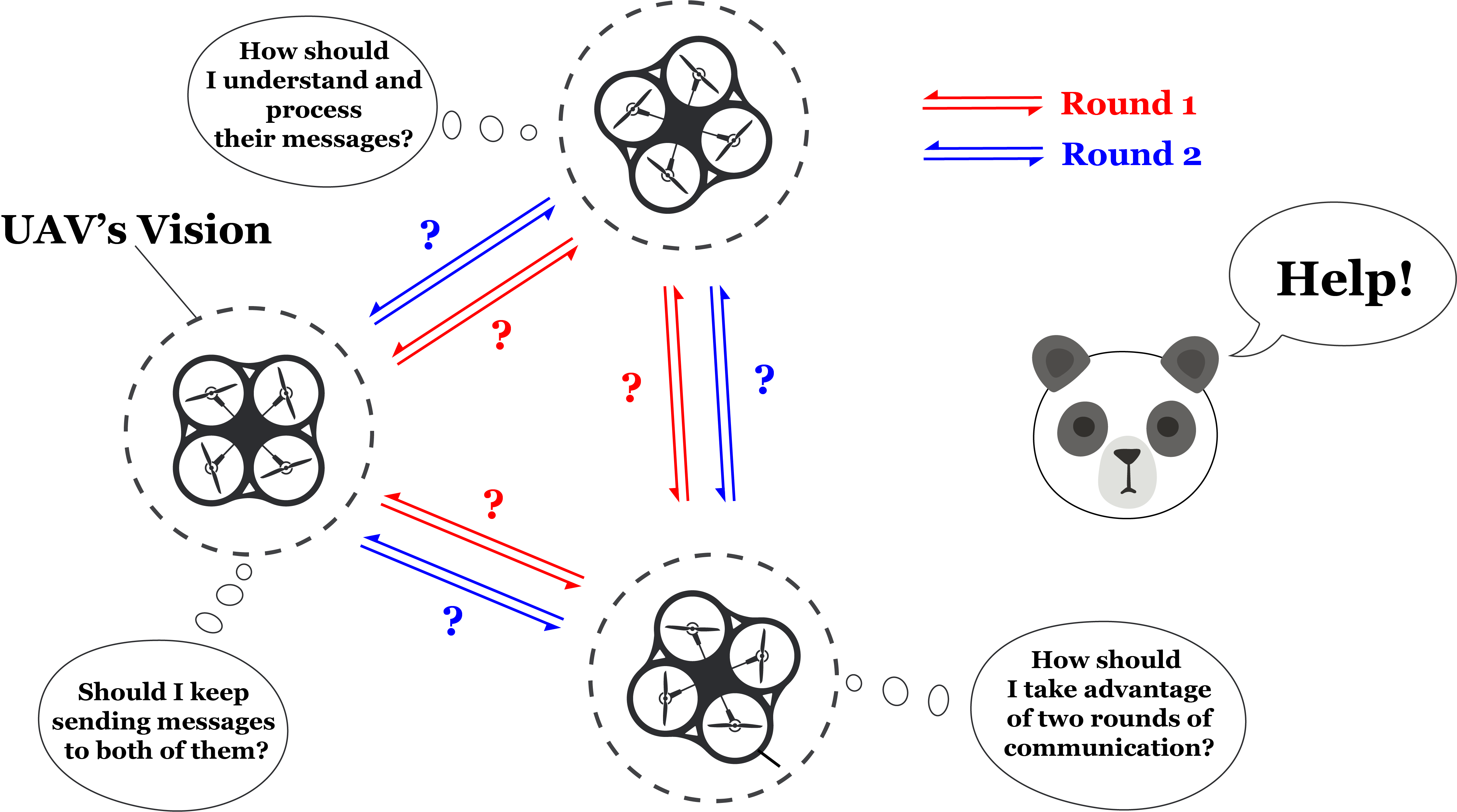
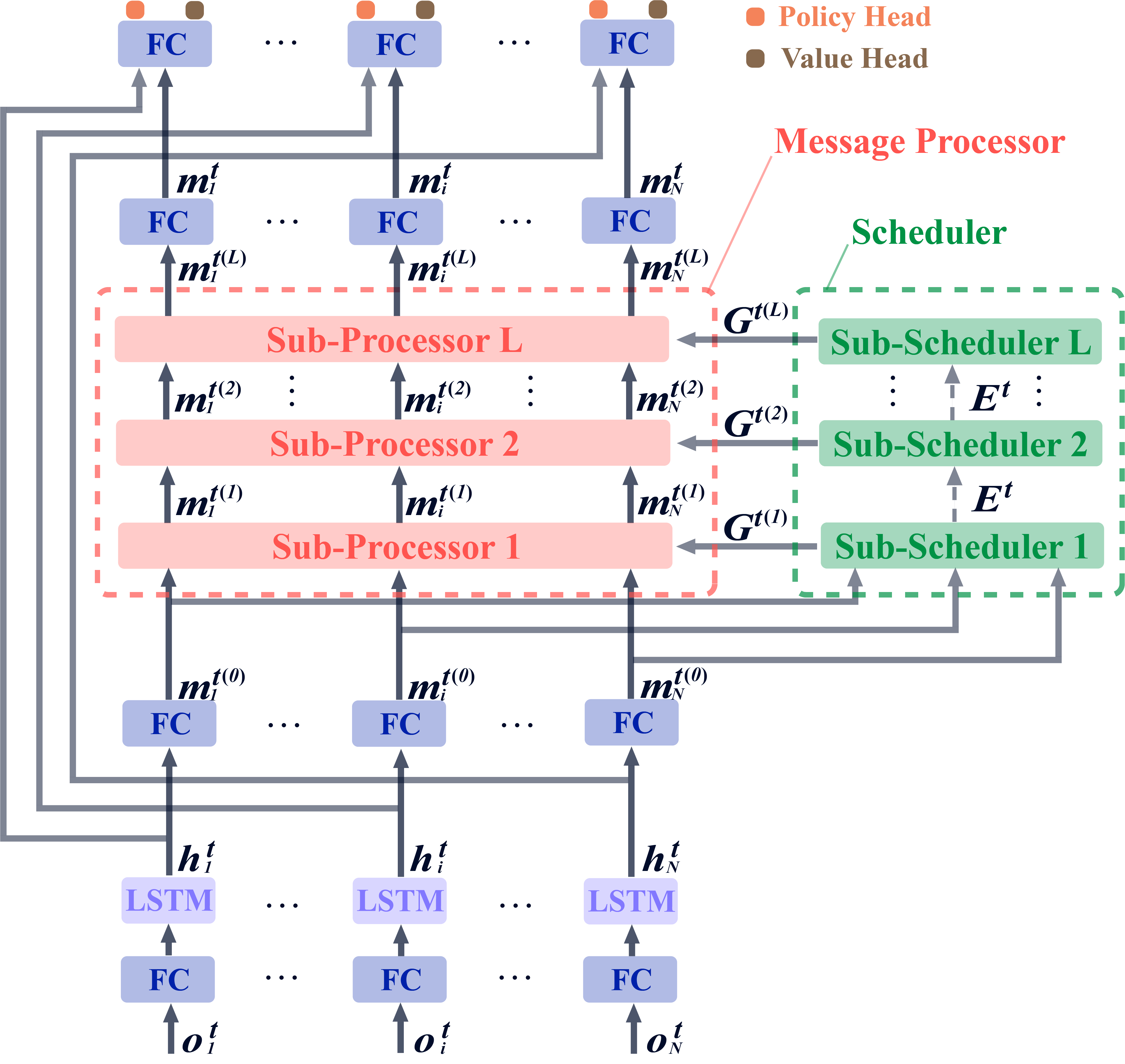
| Oct, 2021 | Our work Multi-Agent Graph-Attention Communication (MAGIC) receives the Best Paper Award at ICCV 2021 Mair2 Workshop! |
Selected Publications
Notation * indicates equal contributions.
-
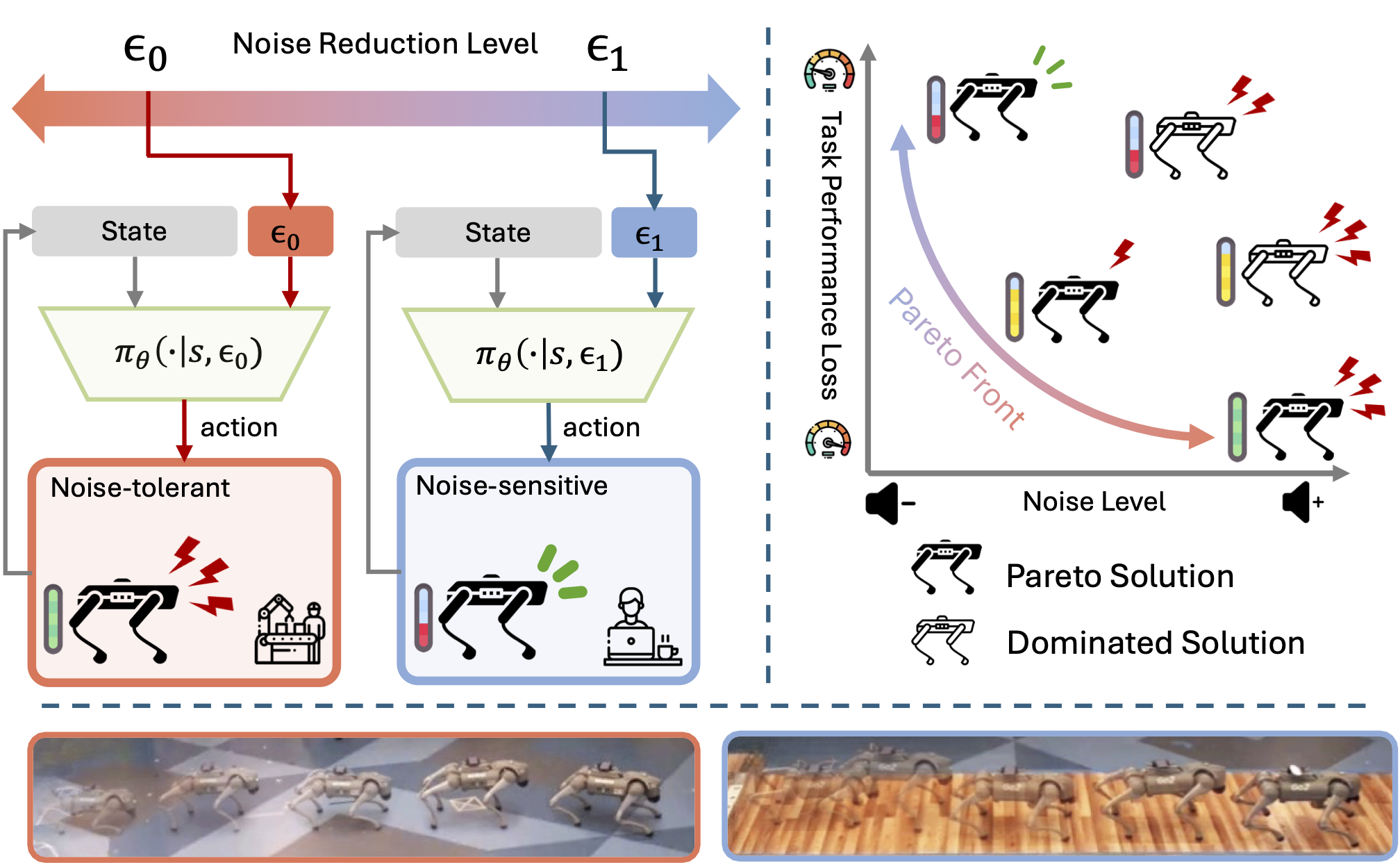
QuietPaw: Learning Quadrupedal Locomotion with Versatile Noise Preference AlignmentIn International Conference on Intelligent Robots and Systems (IROS), 2025
-
LocoMan: Advancing Versatile Quadrupedal Dexterity with Lightweight Loco-ManipulatorsIn International Conference on Intelligent Robots and Systems (IROS), 2024
Spotlight talk at ICRA 2024 Workshop on Future Roadmap for Manipulation SKills -
COMPOSER: Scalable and Robust Modular Policies for Snake RobotsIn International Conference on Robotics and Automation (ICRA), 2024
Abridged in CoRL 2023 Workshop on Learning for Soft Robots: Hard Challenges for Soft Systems (Spotlight) -
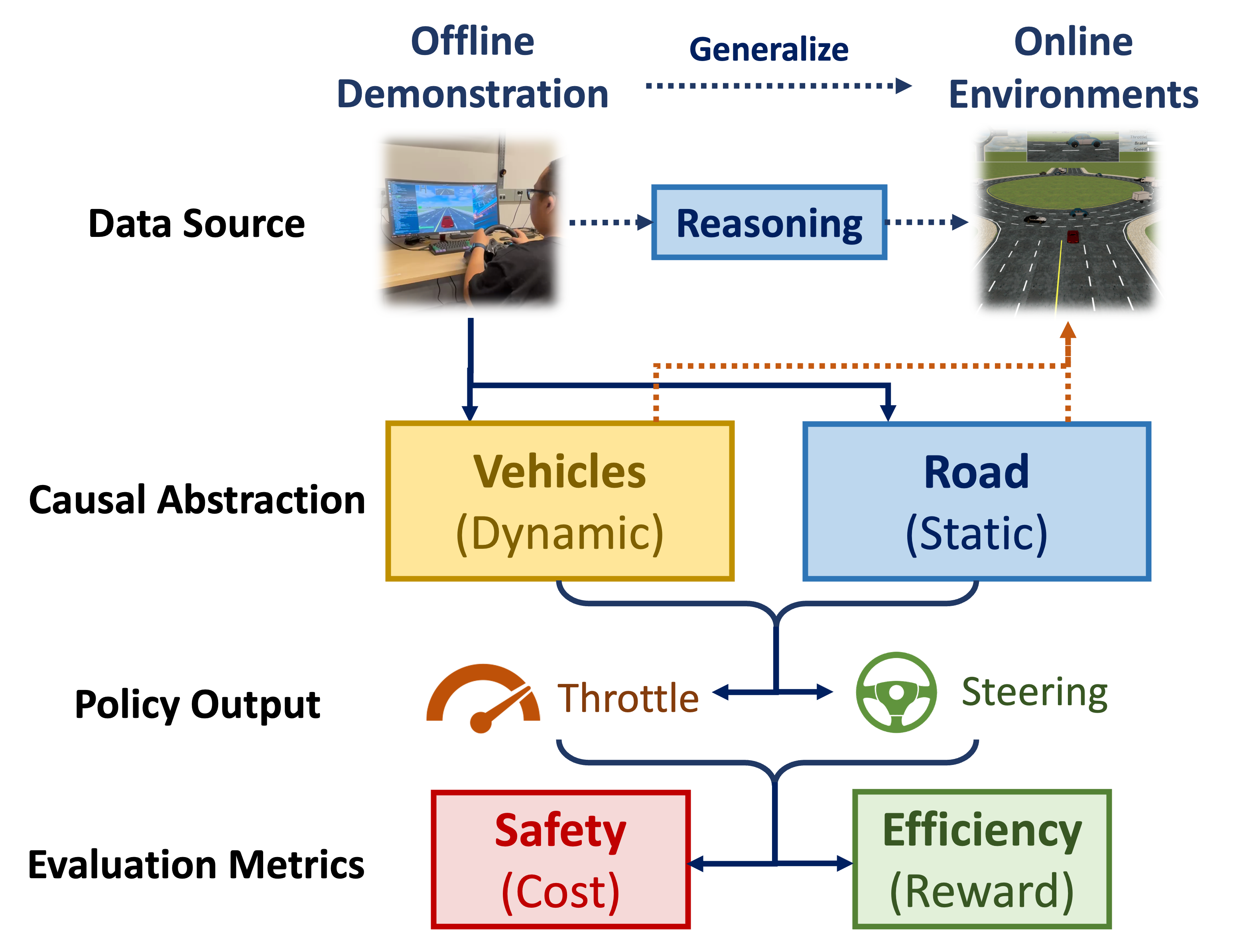
Safety-aware Causal Representation for Trustworthy Reinforcement Learning in Autonomous DrivingRobotics and Automation Letters (RA-L), 2024
Abridged in Machine Learning for Autonomous Driving Symposium -
Creative Robot Tool Use with Large Language ModelsarXiv preprint, 2023
In CoRL 2023 Workshop on Language and Robot Learning and NeurIPS 2023 Workshop on Foundation Models for Decision Making -
GOATS: Goal Sampling Adaptation for Scooping with Curriculum Reinforcement LearningIn International Conference on Intelligent Robots and Systems (IROS), 2023
Abridged in ICRA 2023 Workshop on Representing and Manipulating Deformable Objects [PDF] [Spotlight Talk] -
Group Distributionally Robust Reinforcement Learning with Hierarchical Latent VariablesIn International Conference on Artificial Intelligence and Statistics (AISTATS), 2023
In 5th Symposium on Advances in Approximate Bayesian Inference -
Multi-Agent Graph-Attention Communication and TeamingIn International Conference on Autonomous Agents and Multiagent Systems (AAMAS), 2021 (Oral)
Best Paper Award at ICCV 2021 Mair2 Workshop [PDF] [Spotlight Talk]