Publications
Notation * indicates equal contributions.
-
Learning Versatile Humanoid Manipulation with Touch DreamingInternational Conference on Intelligent Robots and Systems (IROS 2026)
Whole-Body Control and Bimanual Manipulation Workshop (RSS 2026), Oral Presentation -
Learning Human-Robot Collaboration via Heterogeneous-Agent Lyapunov Policy OptimizationInternational Conference on Machine Learning (ICML 2026), Oral (top 0.7%)
-
Dexterous manipulation policies from rgb human videos via 3d hand-object trajectory reconstructionarXiv preprint, 2026
-
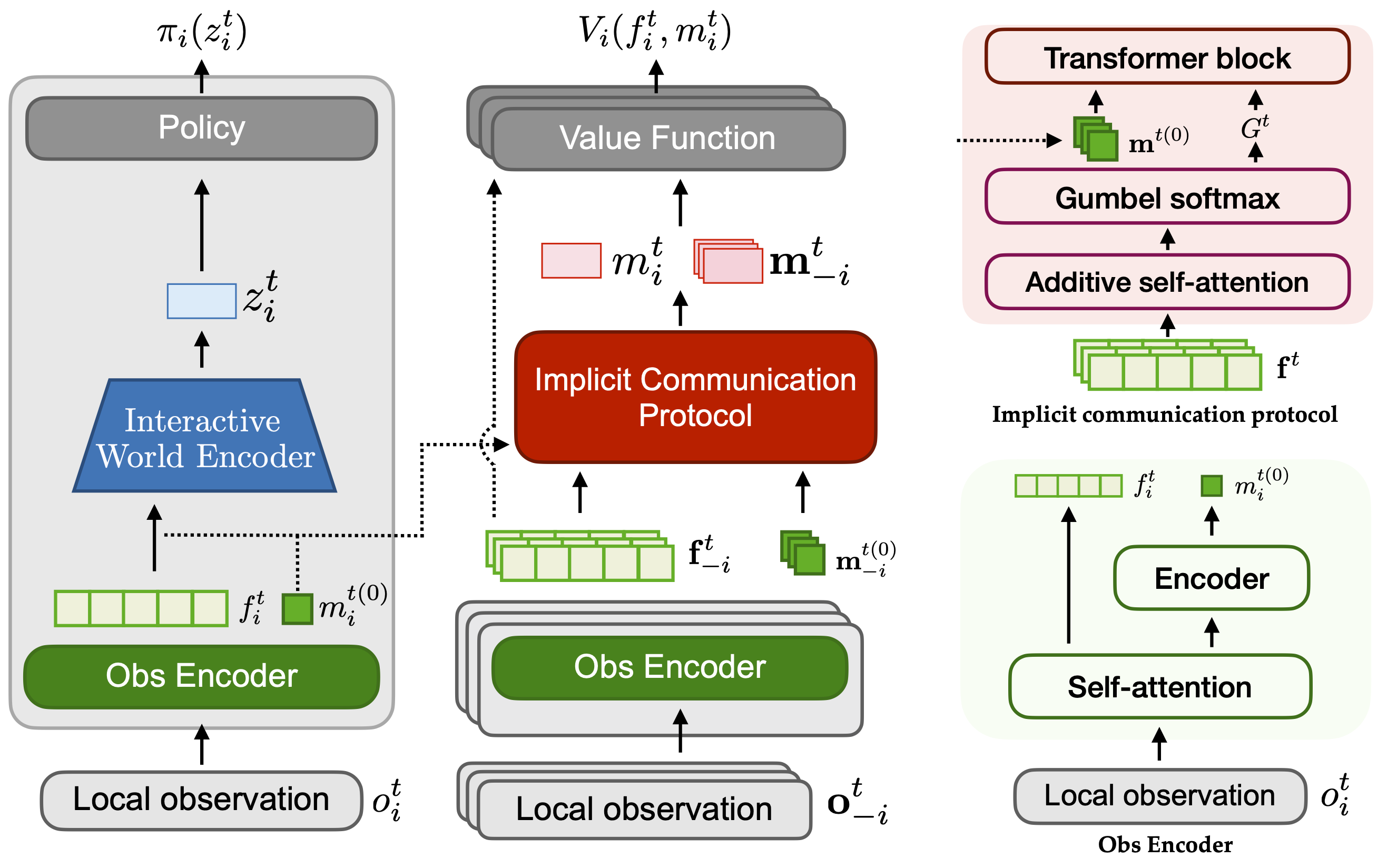
Learning to Interact in World Latent for Team CoordinationarXiv preprint, 2025
ARLET Workshop (NeurIPS 2025), Oral Presentation -
Human2LocoMan: Learning Versatile Quadrupedal Manipulation with Human PretrainingRobotics: Science and Systems (RSS 2025)
-
Learning Multi-Agent Loco-Manipulation for Long-Horizon Quadrupedal PushingInternational Conference on Robotics and Automation (ICRA 2025)
-
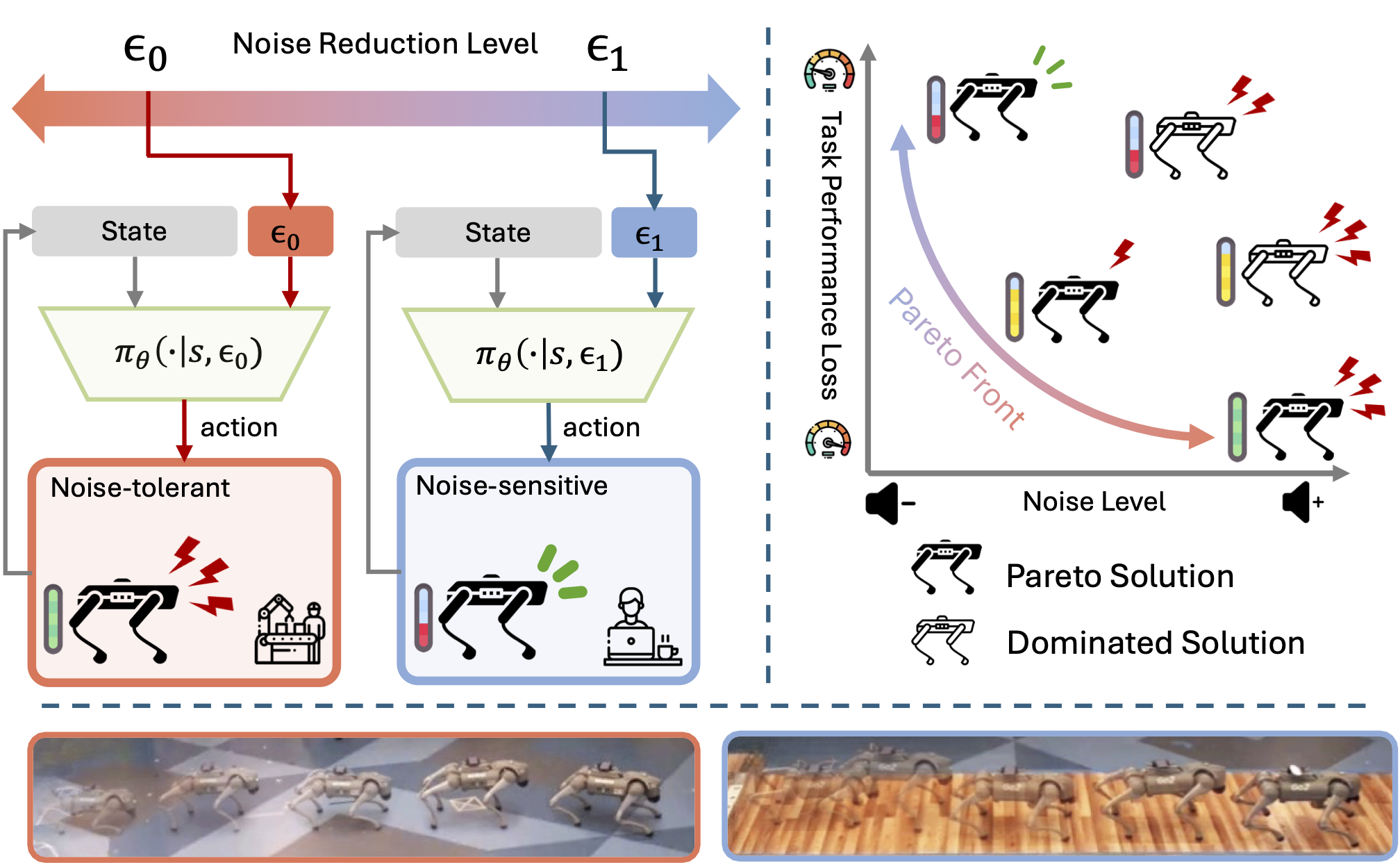
QuietPaw: Learning Quadrupedal Locomotion with Versatile Noise Preference AlignmentInternational Conference on Intelligent Robots and Systems (IROS 2025)
-
The RoboDrive Challenge: Drive Anytime Anywhere in Any ConditionarXiv preprint, 2024
-
LocoMan: Advancing Versatile Quadrupedal Dexterity with Lightweight Loco-ManipulatorsInternational Conference on Intelligent Robots and Systems (IROS 2024)
Future Roadmap for Manipulation Skills Workshop (ICRA 2024), Spotlight -
COMPOSER: Scalable and Robust Modular Policies for Snake RobotsInternational Conference on Robotics and Automation (ICRA 2024)
Learning for Soft Robots Workshop (CoRL 2023), Spotlight -
Safety-aware Causal Representation for Trustworthy Reinforcement Learning in Autonomous DrivingRobotics and Automation Letters (RA-L 2024)

-
Creative Robot Tool Use with Large Language ModelsarXiv preprint, 2023
Language and Robot Learning Workshop (CoRL 2023) -
GOATS: Goal Sampling Adaptation for Scooping with Curriculum Reinforcement LearningInternational Conference on Intelligent Robots and Systems (IROS 2023)
Representing and Manipulating Deformable Objects Workshop (ICRA 2023), Spotlight Talk -
Interpretable Reinforcement Learning for Robotics and Continuous ControlarXiv preprint, 2023
-
The RoboDepth Challenge: Methods and Advancements Towards Robust Depth EstimationarXiv preprint, 2023
-
Group Distributionally Robust Reinforcement Learning with Hierarchical Latent VariablesInternational Conference on Artificial Intelligence and Statistics (AISTATS 2023)
-
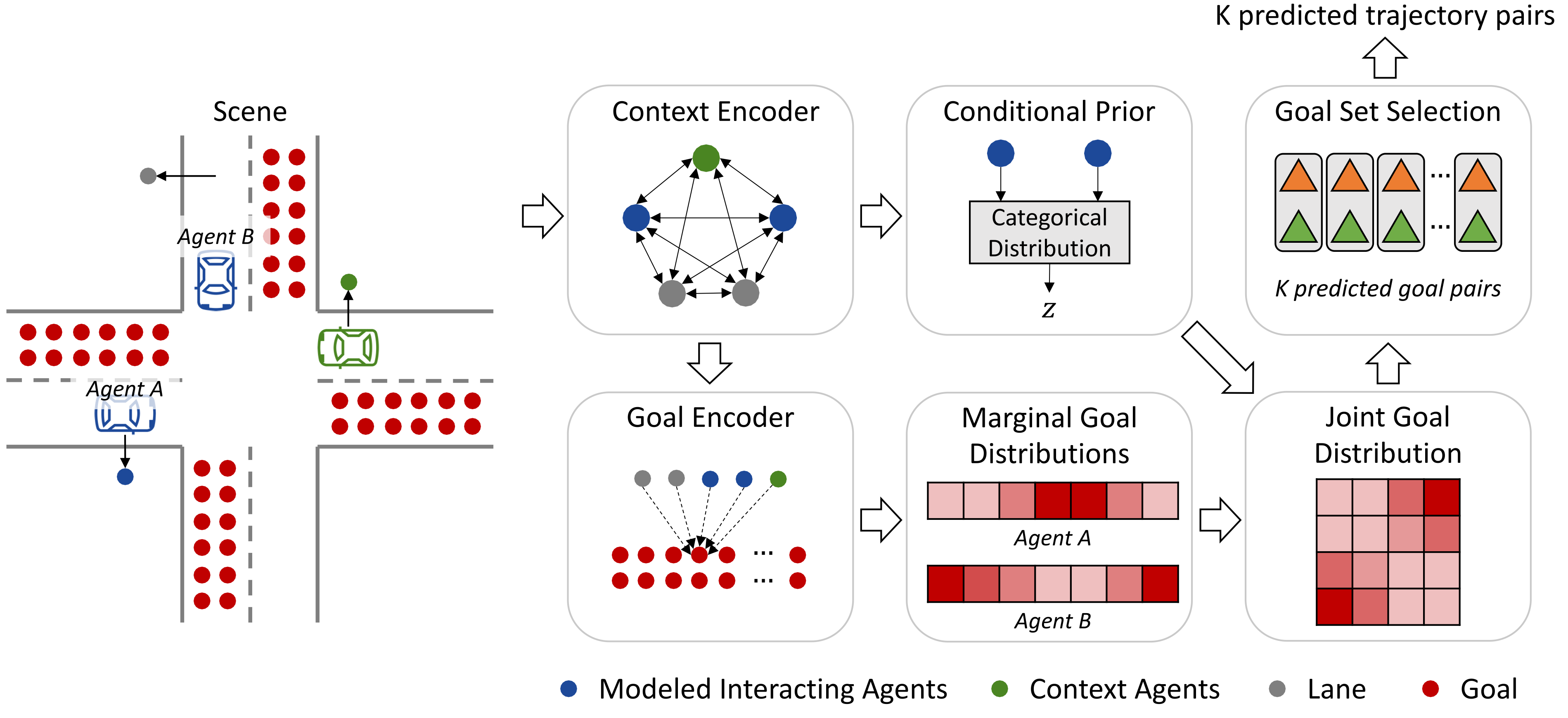
Domain Knowledge Driven Pseudo Labels for Interpretable Goal-Conditioned Interactive Trajectory PredictionInternational Conference on Intelligent Robots and Systems (IROS 2022)
-
Adaptable and Scalable Multi-Agent Graph-Attention CommunicationMaster’s Thesis, Georgia Institute of Technology, 2022
-
Learning Interpretable, High-Performing Policies for Autonomous DrivingRobotics: Science and Systems (RSS 2022)
-
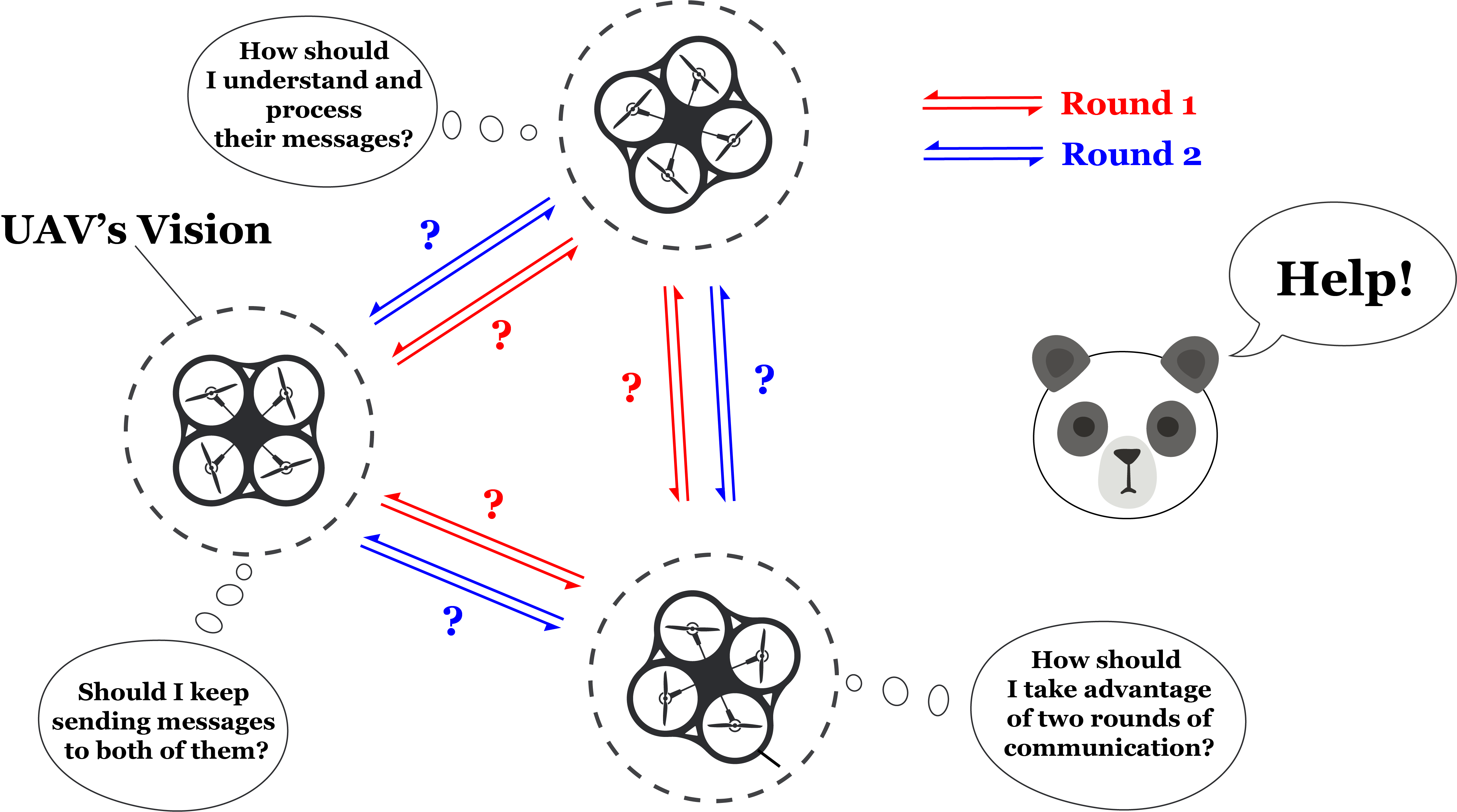
Multi-Agent Graph-Attention Communication and TeamingInternational Conference on Autonomous Agents and Multiagent Systems (AAMAS 2021), Oral
MAIR2 Workshop (ICCV 2021), Best Paper Award
-
Real-Time Whole-Body Imitation by Humanoid Robots and Task-Oriented Teleoperation using an Analytical Mapping Method and Quantitative EvaluationApplied Sciences, 2018